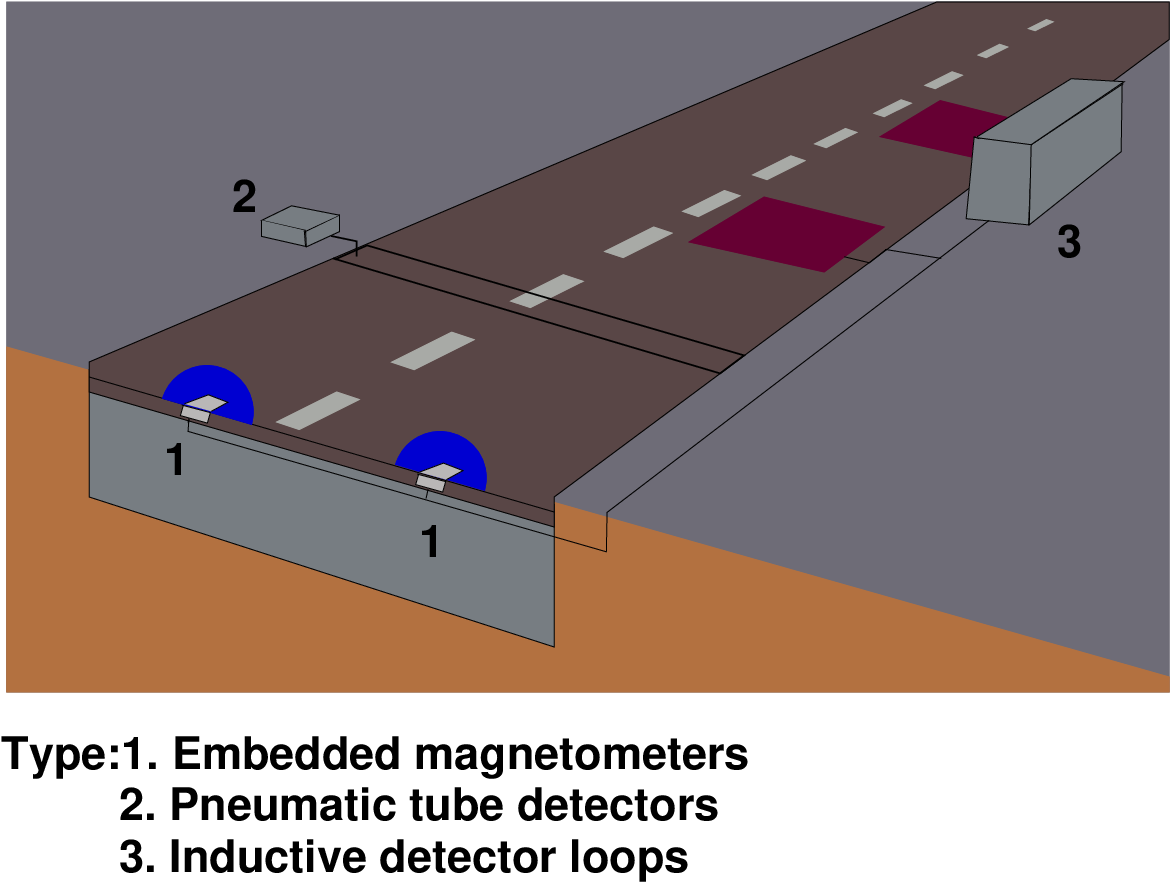
Figure 1: Typical intrusive detector configurations, Source: IMAGINE- Collection
Methods for Additional Data
Typical examples of intrusive technologies, their sensor types and installation locations are
shown in Fig. 1. The first types of units (Fig. 1, Type 1) are passive magnetic or
magneto-meter sensors that are either permanently mounted within holes in the road, or
affixed to the road surface in some fashion. The unit communicates to a nearby base station
processing unit using either wires buried in the road, or wireless communications.
The sensor has a circular or elliptically offset zone of detection (i.e., the blue area).
The second types of units (Fig. 1, Type 2) use pneumatic tubes that are stretched across
the carriageway and affixed at the kerb side at both ends. Such systems are only be deployed
on a temporary basis, due to the fragile nature of tubes, which are easily damaged or torn up
by heavy or fast moving vehicles.
The third type (Fig. 1, Type 3) are inductive detector loops (IDL), consisting of coated wire
coils buried in grooves cut in the road surface, sealed over with bituminous filler. A cable
buried with the loop sends data to a roadside processing unit. The zone of detection for
inductive loop sensors depends on the cut shape of the loop slots. The zones depending on
the overall sensitivity of system not correspond precisely to the slot dimensions. IDLs
are a cheap and mature technology. They are installed on both major roads and
within urban areas, forming the backbone detector network for most traffic control
systems.
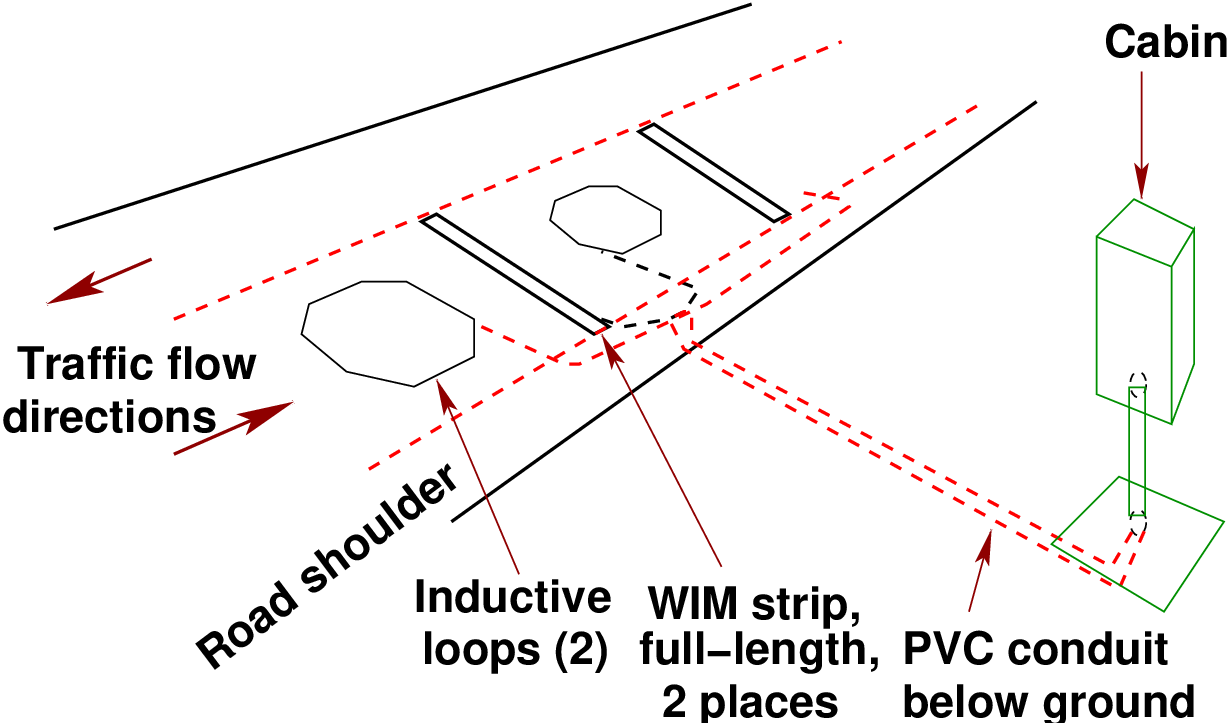
The fourth type of intrusive system is Weigh-In-Motion (WIM) shown in Fig. 2, detectors that
consist of a piezoelectric sensor (e.g. ‘bending-plate’ or fiber-optic) system laid in a channel
across the road. These systems are relatively rare and are used in specific locations
for enforcement or access control. They are usually coupled with other systems,
either intrusive or non-intrusive, to provide additional cross-checks on collected data.
Pneumatic road tube sensors send a burst of air pressure along a rubber tube when a
vehicles tire passes over the tube. The pulse of air pressure closes an air switch, producing
an electrical signal that is transmitted to a counter or analysis software. The pneumatic road
tube sensor is portable, using lead-acid, gel, or other rechargeable batteries as a power
source. The road tube is installed perpendicular to the traffic flow direction and is
commonly used for short-term traffic counting, vehicle classification by axle count
and spacing. Some data to calculate vehicle gaps, intersection stop delay, stop
sign delay, and saturation flow rate, spot speed as a function of vehicle class, and
travel time when the counter is utilized in conjunction with a vehicle transmission
sensor.
Advantages
Disadvantages
Oscillating electrical signal is applied to the loop. The metal content of a moving
vehicle chassis changes the electrical properties of circuit. Changes are detected at a
roadside unit, triggering a vehicle event. A single loop system collects flow and
occupancy. The speed can be calculated by the assumptions that are made for the mean
length of vehicles. Two-loop systems collect flow, occupancy, vehicle length, and
speed.
Advantages
Disadvantages
A typical single loop system is shown in Fig. 3. The system consists of three components: a detector oscillator, a lead-in cable and a loop embedded in the pavement. The size and shape of loops largely depend on the specific application. The most common loop size is 1.83 m by 1.83 m and shape is hexagonal as single turn or two or three turns as shown in Fig. 3. When a vehicle stops or passes over the loop, the inductance of the loop is decreased.The decreased inductance then increases the oscillation frequency and causes the electronics unit to send a pulse to controller, indicating the presence or passage of a vehicle. Single loop detectors output predicts occupancy and traffic count data within specific time intervals like 20 sec, 30 sec.
Dual-loop detectors are also called speed traps, T loops, or double loop detectors. In a dual-loop system, two consecutive single inductance loops, called “M loop” and “S loop”, are embedded a few distance apart as shown in Fig. 4. With such a design, when one of them detects a vehicle, timer is automatically started in the dual-loop system and runs until the same vehicle is detected by other loop.Thus, in addition to outputs of vehicle count and occupancy data, individual vehicle speeds can be trapped through the dividend of the distance between those two single loops ldist by the elapsed time. Speed trap is defined as the measurement of the time that a vehicle requires to travel between two detection points. Spot speed is measured by following Eqn. 1.
 | (1) |
where,
ldist = Distance between two loops in meters
t1 = Vehicle entry time at first loop in sec
t2 = Vehicle entry time at second loop in sec
Dual-loop detectors can also be used to measure vehicle lengths with extra data
extracted from controllers’ records. The length of vehicle is measured by following
Eqn. 2:
 | (2) |
where,
Lvehicle = Length of vehicle in meters.
oti = on-time for loop detector i; Speed in m/sec
Example-1
If the vehicle entering the freeway in loop M at time 8:32:22:00 am and leaving loop N at time
8:32:22:15 am, the distance between two loops will be 3.66 m. Find the spot speed of the
vehicle. Also find the length of the vehicle if time occupancy for M - loop is 0.25sec and 0.29
for N - loop.
Solution:
Step 1 Spot Speed calculated from the equation 1, where given that the distance between
two loops are 3.66m and entry, exit times are 8:32:22:00 and 8:32:22:15 substitute in Eqn. 1.
SpotSpeed = (3.66)∕(15 - 0)∕100 = 24.4 m∕sec.
Step 2 The vehicle length can obtained by the spot speed of the vehicle, so substitute the
occupancy times at exit and entry in the Eqn. 2.
 | (3) |
Fig. 5 shows a two-lane unidirectional roadway segment with single loop detectors installed.Assume that the detection zone length is ld and is equal to the detector length, the length of the vehicle is lv, the speed of the vehicle is S, then the actual time (the time period that the vehicle is over the detector) can be calculated by:
 | (4) |
where,
S = Spot speed in m/sec
EV L =vehicle length lv + detector length ld
to = Occupancy time
There are many algorithms for estimating speed by single loop. The most common method is based on the relationship between fundamental traffic variables. It uses a constant or a function to convert loop occupancy into density. The variables include inductive loop length, average vehicle length, occupancy, and traffic volume.For the given number of vehicle and duration of the observed data the specimen speed can find by following Eqn. 5 is shown below.
 | (5) |
where,
S = Space mean speed in m/sec
N = Number of vehicles in the observed interval
T = Observation interval in sec
O = occupancy time
g = speed correction factor; (based upon assumed vehicle length, detector configuration, and
traffic conditions) Most of the algorithms followed as (40.9/6.55) for average vehicle length
6.55m.
Example-2
The length of vehicle is 4 m and the length of loop detector zone is 1.83 m. The time
occupancy in the loop is 0.3 sec, find the spot speed of the vehicle?
Solution:
From the given data the average vehicle length is 4 m and the length of loop detector zone is
1.833 m, the time occupancy in loop is 0.3 sec substitute in Eqn. 1.
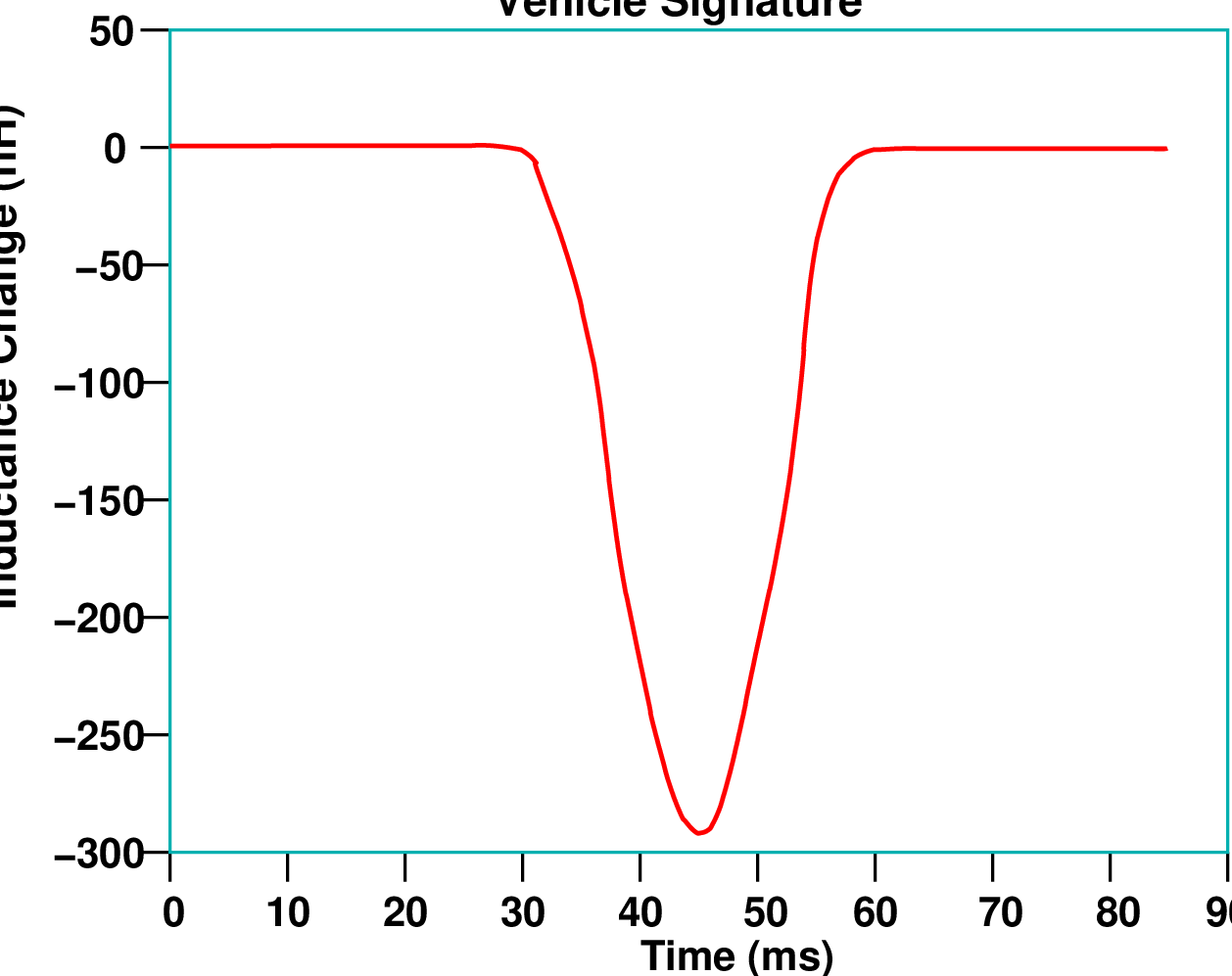
Loop detectors detect the frequency changes from zero to different level, the inductance
changes are computed by change in frequency. The change in inductance due to the
presence of vehicle is recorded at a small time interval. The waveform obtained by
plotting the sampled inductance changes is referred to as the vehicle inductive
waveform or inductance signature.This waveform depends on number of vehicle
parameters such as vehicle length, speed, and metal surface of the vehicle. Fig. 6
shows an inductive waveform of a typical passenger car.Horizontal axis records data
points at 10 milliseconds interval. This is the common shape of inductance waveform
that has one peak in the middle with monotonic decrease in both sides. Vehicle
signatures are functions of vehicle speed and vehicle type, so many features can be
derived from the vehicle signatures directly or indirectly. Volume and occupancy are
directly derived from processing raw vehicle signatures whereas speed is estimated
based on the vehicle signature feature vectors. Vehicle length is obtained based on
vehicle speed. By combining vehicle length with existing vehicle signature features,
vehicle classification can be measured. It is easy to observe signature differences
arising from the vehicle speed. Duration or occupancy has an inverse proportional
relationship with speed while slew rate shows a proportional correspondence with speed.
A series of vehicle signature acquired by the Inductive Loop Detectors located at upstream and downstream of a freeway and different distance measures to find the re identification accuracy level. Double-axle trucks produce a double picked vehicle signature when the resolution of detector is adequate. Thus, it can be easily used for vehicle-type identification purposes.
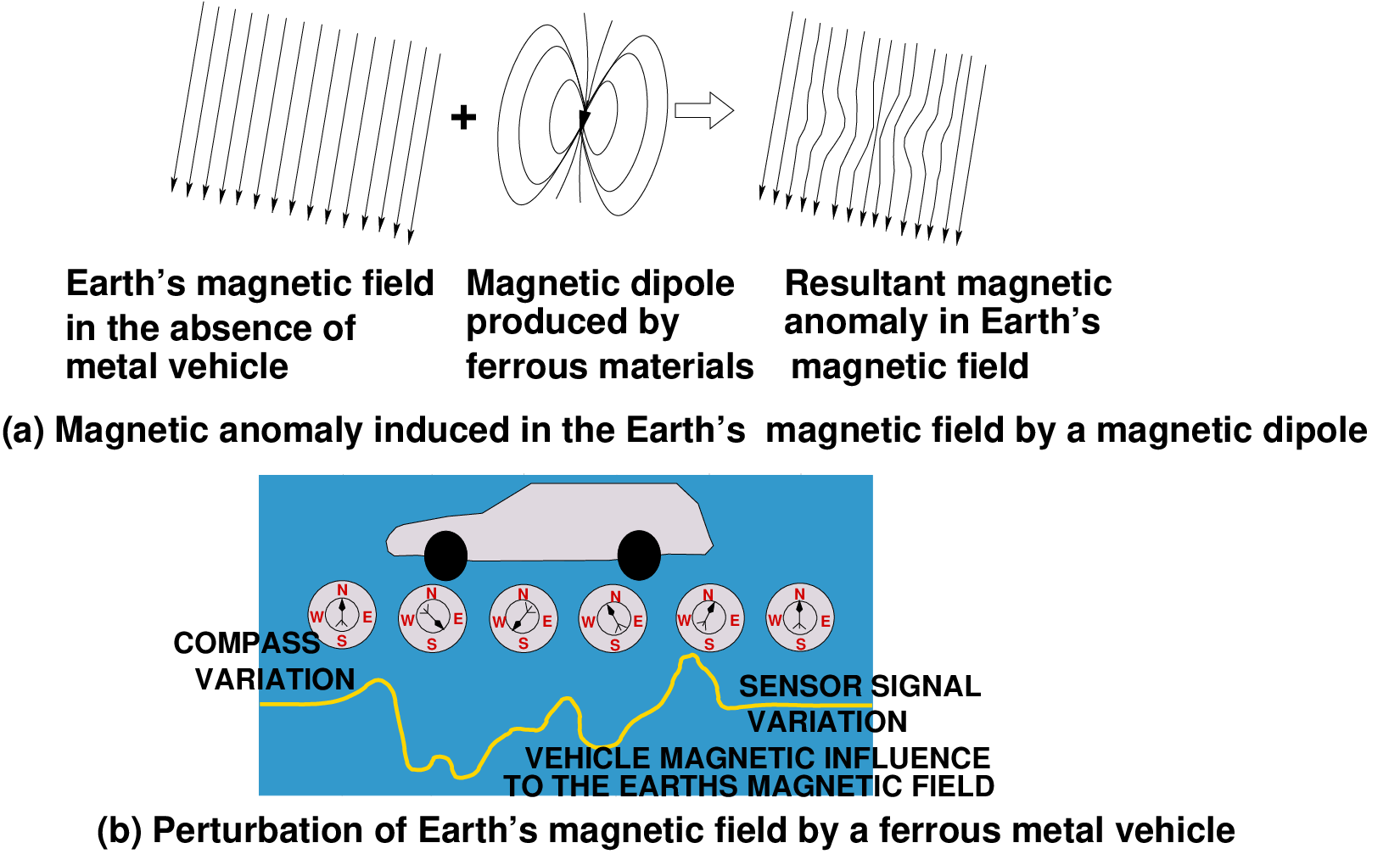
Magneto-meters monitor for fluctuations in the relative strength of the Earth’s magnetic field,
which is changed by the presence of a moving metal object i.e., a vehicle. A single passive
magnetic system collects flow and occupancy. Two magneto-meter systems collect flow,
occupancy, vehicle length, and speed.
Two types of magnetic field sensors are used for traffic flow parameter measurement. The first
type, the two-axis flux-gate magneto-meter, detects changes in vertical and horizontal
components of the Earth s magnetic field produced by a ferrous metal vehicle. The two-axis
flux-gate magneto-meter contains a primary winding and two secondary sense winding on a
coil surrounding high permeability soft magnetic material core. The second type of
magnetic field sensor is the magnetic detector, more properly referred to as an
induction or search coil magneto-meter shown in Fig. 7. It detects the vehicle signature
by measuring the change in the magnetic lines of flux caused by the change in
field values produced by a moving ferrous metal vehicle. These devices contain a
single coil winding around a permeable magnetic material rod core. However, most
magnetic detectors cannot detect stopped vehicles, since they require a vehicle
to be moving or otherwise changing its signature characteristics with respect to
time.
Advantages
Disadvantages
Bending plate WIM systems utilize plates with strain gauges bonded to the underside. The
system records the strain measured by strain gauges and calculates the dynamic load. Static
load is estimated using the measured dynamic load and calibration parameters. Calibration
parameters account for factors, such as vehicle speed and pavement or suspension dynamics
that influence estimates of the static weight. The accuracy of bending plate WIM
systems can be expressed as a function of the vehicle speed traversed over the plates,
assuming the system is installed in a sound road structure and subject to normal traffic
conditions.
Advantages
Bending plate WIM systems is used for traffic data collection as well as for weight
enforcement purposes. The accuracy of these systems is higher than piezoelectric systems
and their cost is lower than load cell systems. Bending plate WIM systems do not require
complete replacement of the sensor.
Disadvantages
Bending plate WIM systems are not as accurate as load cell systems and are considerably
more expensive than piezoelectric systems.
Piezoelectric WIM systems contain one or more piezoelectric sensors that detect a change in
voltage caused by pressure exerted on the sensor by an axle and thereby measure the axle s
weight. As a vehicle passes over the piezoelectric sensor, the system records the sensor
output voltage and calculates the dynamic load. With bending plate systems, the
dynamic load provides an estimate of static load when the WIM system is properly
calibrated.
The typical piezoelectric WIM system consists of at least one piezoelectric sensor and two
ILDs. The piezoelectric sensor is placed in the travel lane perpendicular to the travel
direction. The inductive loops are placed upstream and downstream of the piezoelectric
sensor. The upstream loop detects vehicles and alerts the system to an approaching
vehicle. The downstream loop provides data to determine vehicle speed and axle
spacing based on the time it takes the vehicle to traverse the distance between the
loops. Fig. 8 shows a full-lane width piezoelectric WIM system installation. In this
example, two piezoelectric sensors are utilized on either side of the downstream
loop.
Advantages
Typical piezoelectric WIM systems are among the least expensive systems in use today in
terms of initial capital costs and life cycle maintenance costs. Piezoelectric WIM systems can
be used at higher speed ranges (16 to 112 kmph) than other WIM systems. Piezoelectric WIM
systems can be used to monitor up to four lanes.
Disadvantages
Typical piezoelectric systems are less accurate than load cell and bending plate WIM
systems. Piezoelectric sensors for WIM systems must be replaced at least once every 3
years.
Problems:

Each detector technology and particular device has its own limitations and individual capability. The successful application of detector technologies largely depends on proper device selection. Many factors impact detector selection, such as data type, data accuracy, ease of installation, cost and reliability. ILD’s are flexible to satisfy different variety of applications, but installation requires pavement disturb.
I wish to thank several of my students and staff of NPTEL for their contribution in this lecture. Specially, I wish to thank my student K. B. Raghuram for his assistance in developing the lecture note, and my staff Ms. Reeba in typesetting the materials. I also appreciate your constructive feedback which may be sent to tvm@civil.iitb.ac.in
Prof. Tom V. Mathew
Department of Civil Engineering
Indian Institute of Technology Bombay, India
_________________________________________________________________________
Thursday 31 August 2023 12:12:27 AM IST