Non-Intrusive Technologies
Lecture Notes in Transportation Systems Engineering
Contents
______________________________________________________________________
1 Introduction
Non-intrusive technologies include video data collection, passive or active infrared detectors,
microwave radar detectors, ultrasonic detectors, passive acoustic detectors, laser detectors
and aerial photography. All these technologies represent emergent fields that are expanding
rapidly with continuing advances in signal processing. At present time such technologies
are used to provide supplemental information for selected locations or for specific
applications (e.g., queue detection at traffic signals). Most non-intrusive systems are
operationally and somewhat visually similar, consisting of small electronics unit
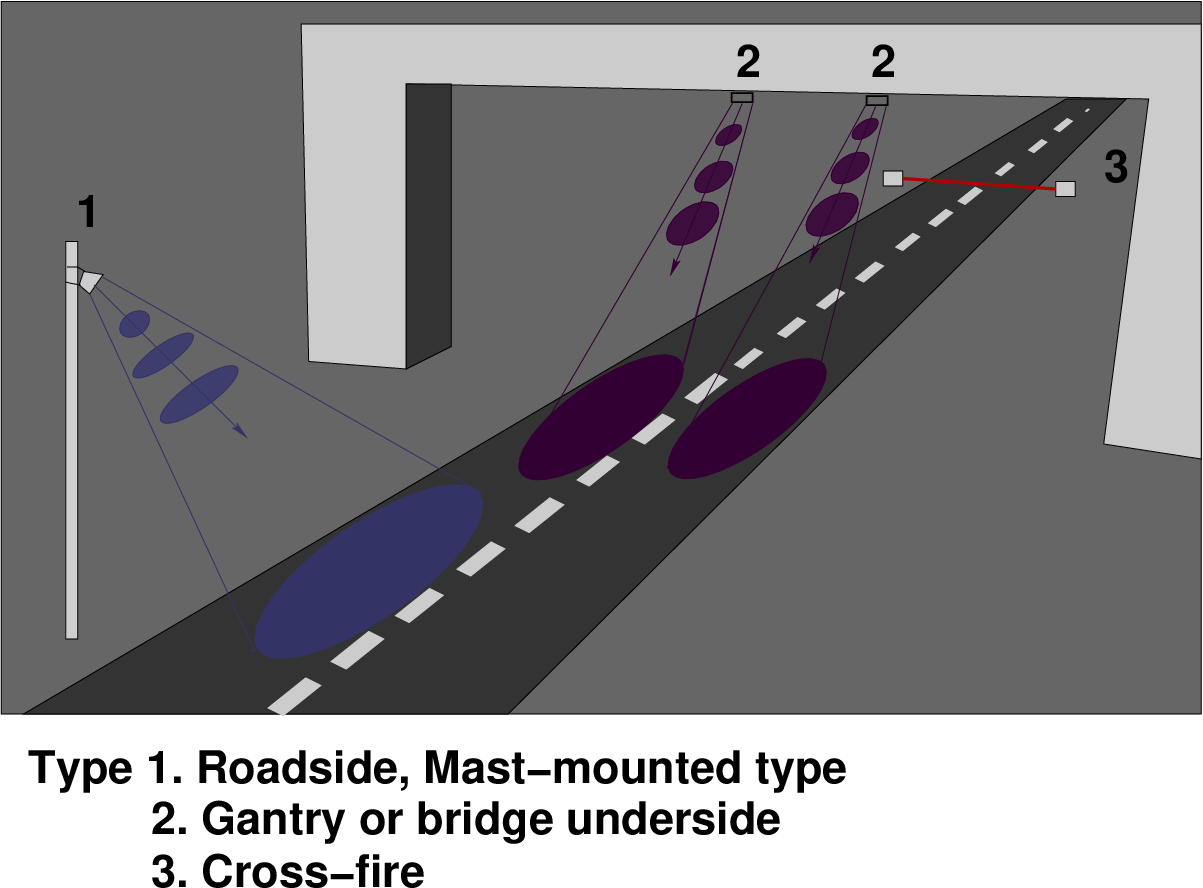
mounted in a weatherproof housing placed in various locations, as shown in Fig. 1.
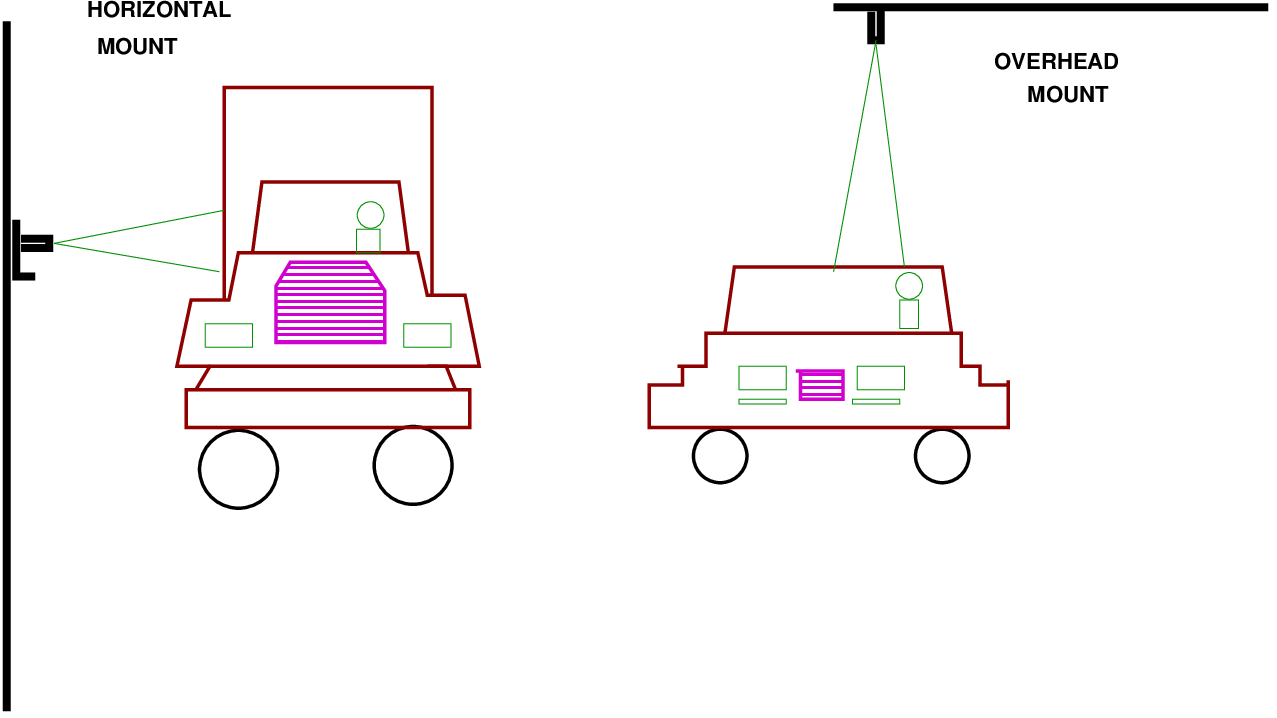
The first type of non-invasive detectors are roadside mast-mounted. The detector possesses
a field-of-regard covering an oblique area upstream or downstream of the unit. There are also
multiple zones of detection defined within the overall field of regard, or the overall zone of
detection same as the field of regard, depending on the specific detector type and technology.
Obscuration problems occur when high-sided vehicles screens lower vehicles from the
detector or the field-of-view being too large, leading to detection of vehicles outside the
desired lane.
The second type of non-invasive detectors are mounted on gantries or bridge undersides,
with field of regard directly below, or at a slight oblique to the unit. Finally, some units, such as
open-path pollutant monitors are mounted road side at ground level, firing a beam across the
road. Such units are subject to side-by-side masking and hence most suitable for only single
lane, unidirectional flows.
2 Video image detection (VID)
The traffic parameters are collected by frame-by-frame analysis of video images captured by
roadside cameras. The following parameters are collected: Depending on the processing
methodology almost all traffic parameters are captured from video analysis. Simple video
systems often collect flow volume and occupancy. More complex systems allow the extraction
of further parameters.
Advantages
Possibility to capture all desired traffic information, including some parameters that are
not readily obtainable using other types of detectors Possibility of a permanent
visual record of the traffic flow that reviewed and analyzed by a human operator.
Disadvantages
VID systems are susceptible to obscure issues, as with other non-intrusive detectors.
Performance of VID systems might be degraded in bad weather or low light conditions.
- Video Image Processor
A video image processor (VIP) system typically consists of one or more cameras,
a microprocessor-based computer for digitizing and processing the imagery, and
software for interpreting the images and converting them into traffic flow data.
- Principles of Operation
Video image processor systems detect vehicles by analyzing the imagery from
a traffic scene to determine changes between successive frames. VIP system
typically consists of one or more cameras, a microprocessor-based computer for
digitizing and processing the imagery, and software for interpreting the images
and converting them into traffic flow data.
The algorithms are designed to remove gray level variations in the image
background caused by weather conditions, shadows, and daytime or night time
artifacts and retain objects identified as automobiles, trucks, motorcycles, and
bicycles. Traffic flow parameters are calculated by analyzing successive video
frames. Color imagery can also be exploited to obtain traffic flow data. However,
somewhat reduced dynamic range and sensitivity have so far inhibited this
approach. Traffic flow parameters are calculated by analyzing successive video
frames. Color imagery can also be exploited to obtain traffic flow data.
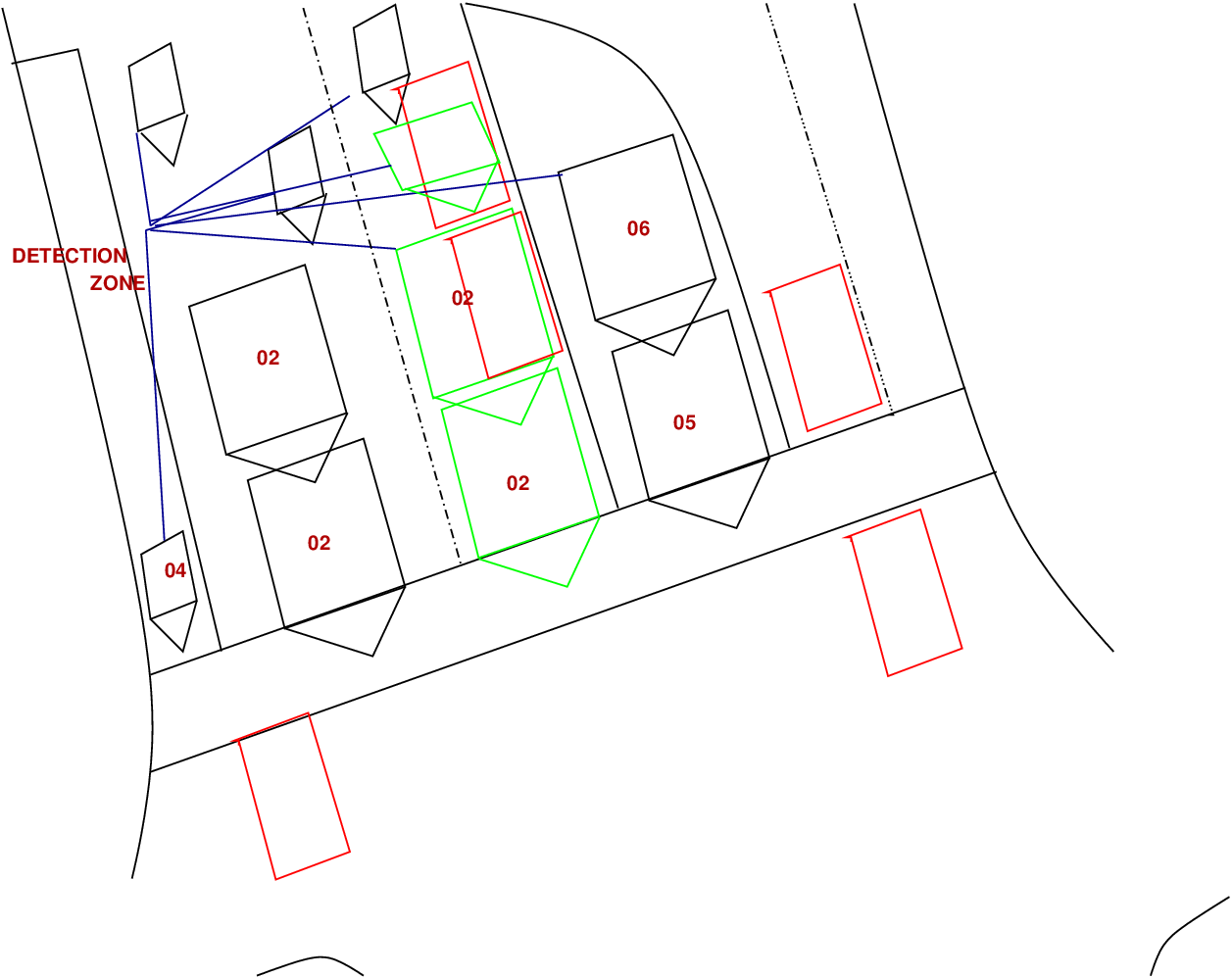
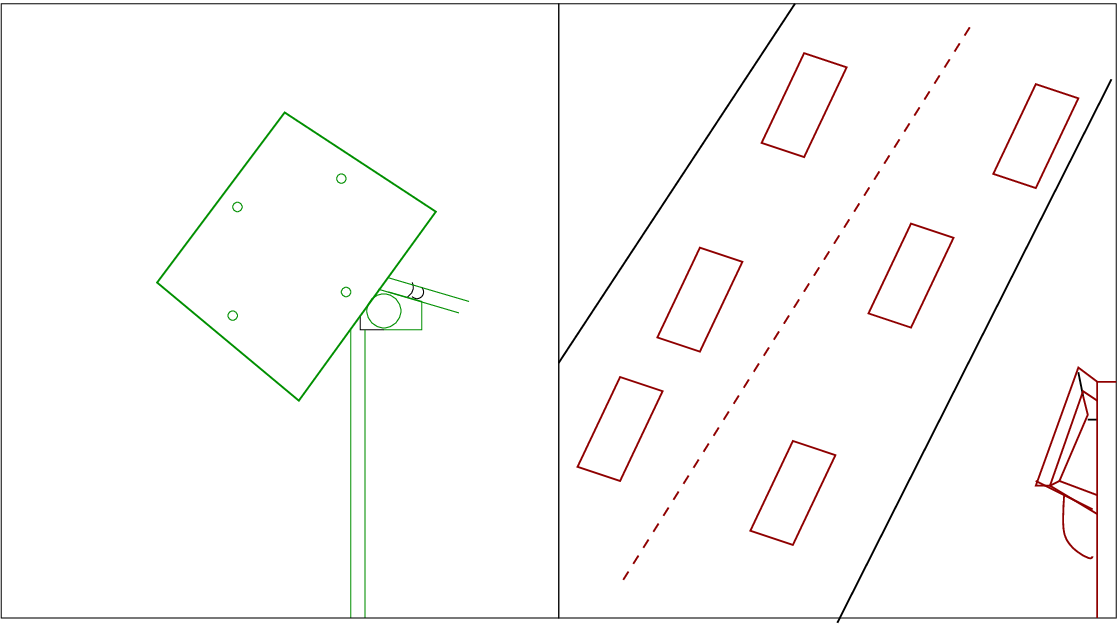
Three different types of VIP systems are available; they are tripline, closed-loop
tracking, and data association tracking. Fig. 2 shows tripline systems which
operate by allowing the user to define a limited number of detection zones in the
field of view of the video camera. When a vehicle crosses one of these zones,
it is identified by noting changes in the pixels caused by the vehicle relative to
roadway in the absence of a vehicle. Surface-based and grid-based analyses are
utilized to detect vehicles in tripline VIPs. Tripline systems estimate vehicle speed
by measuring the time it takes for an identified vehicle to travel a detection zone
of known length. The speed is found as the length divided by the travel time.
Closed-loop tracking systems are an extension of the tripline approach that
permits vehicle detection along larger roadway sections. The closed-loop systems
track vehicles continuously through the field of view of camera. Multiple
detections of the vehicle along a track are used to validate the detection. These
tracking systems provide additional traffic flow data such as lane-to-lane vehicle
movements. These have the potential to transmit information to roadside displays
and radios to alert drivers to erratic behavior that can lead to an incident. Data
association tracking systems identify and track a particular vehicle or groups of
vehicles as they pass through the field of view of camera. The computer identifies
vehicles by searching for unique connected areas of pixels. These areas are then
tracked frame-to-frame to produce tracking data for the selected vehicle or vehicle
groups.
- System Design
System design consist of following four stages, construction of background
image, detection of frame features, matching of detected frame features and
refining matched vehicle features. Creating a background image (an image
representing the scene without moving vehicles) using a computer is a difficult
task. The reason is that a computer, unlike humans, is unable to distinguish
background and vehicles by considering a single image. The number of frames
improves the quality of background images, it increases the time consumed in
creating them. This is caused by the large number of mathematical instructions
required to construct a background image.
In the second stage it analyzes each frame in the sequence and detects features
that correspond to moving vehicles in the scene. Depending on the method used,
several types of features can be highlighted to represent moving vehicles. In
the second stage apply background subtraction on each frame to remove the
static background of the scene. The resulting image consists of blobs (collections
of pixels with non-zero values) corresponding to moving vehicles. These blobs
are enhanced by processing further and detected as the main feature. Several
attributes about the blobs are recorded in memory for processing in the coming
stages.
Also, there are false blobs, not corresponding to any moving object. Such blobs are
present because of excessive noise in the image or poor quality of the background
image. Such features need not be processed further for estimating traffic flow.
Therefore, these features are identified from the input features and discarded. Now,
the remaining features can be considered as vehicle features. In third stage
by matching the features detected in previous frames with those from the
current frame, vehicles can be tracked. In the final stage matched vehicle
features can be refined to correct features in the frames. However, this is a
complex task, as most of the information in the image has been lost after
labeling. Therefore, it is necessary to extract information from original frames
to perform this task. All these system design process are done by different
algorithms.
3 Infrared Sensors
The sensors are mounted overhead to view approaching or departing traffic or traffic from a
side-looking configuration. Infrared sensors are used for signal control; volume, speed, and
class measurement, as well as detecting pedestrians in crosswalks. With infrared
sensors, the word detector takes on another meaning, namely the light-sensitive
element that converts the reflected or emitted energy into electrical signals. Real-time
signal processing is used to analyze the received signals for the presence of a
vehicle.
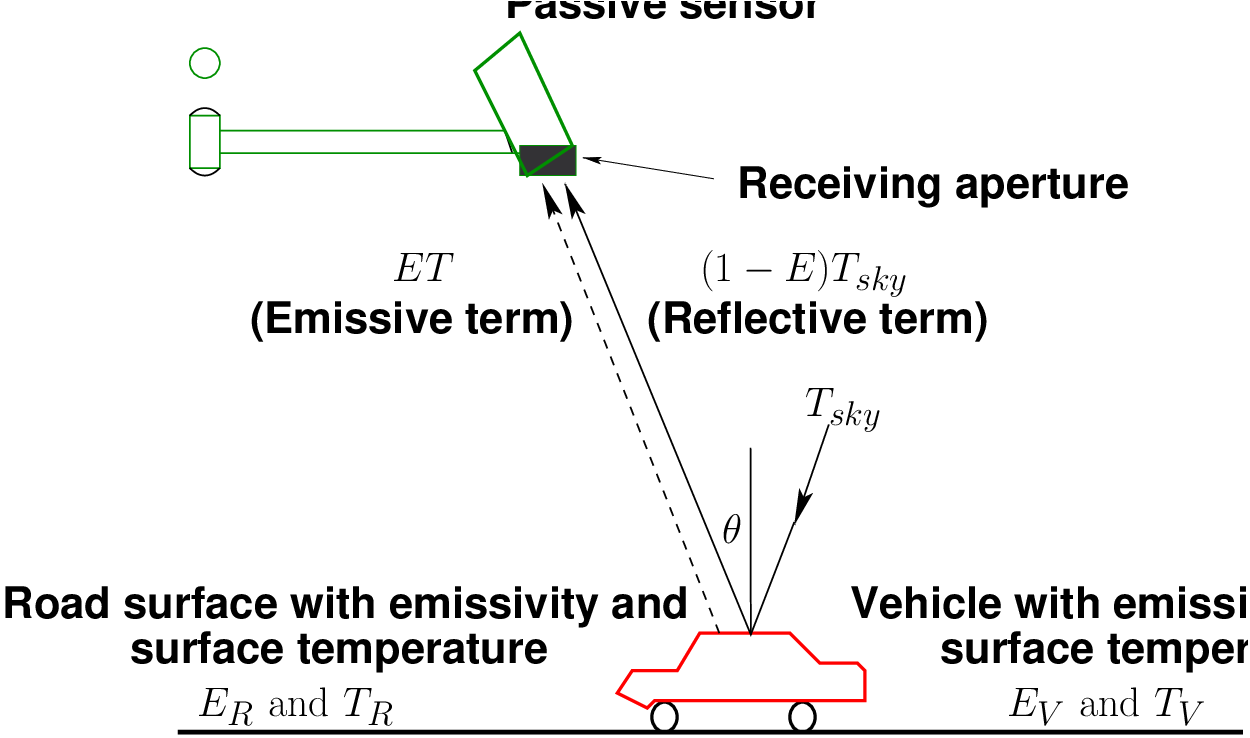
- Passive Infrared (PIR)
Detection of vehicle based on emission or reflection of infrared (electromagnetic
radiation of frequency 1011-1014Hz) radiation from vehicle surface, as compared
to ambient levels emitted or reflected from the road surface shown in Fig. 3. The
PIR system collected following parameters: Flow volume, Vehicle presence, and
detection zone occupancy. Speed with unit with multiple detection zones.
Advantages
- Relatively long wavelength of light used in PIR systems makes them less
susceptible to weather effects.
Disadvantages
- Accuracy of speed information is poor with low resolution sensors. Vehicle
length determination is highly problematic for the same reason.
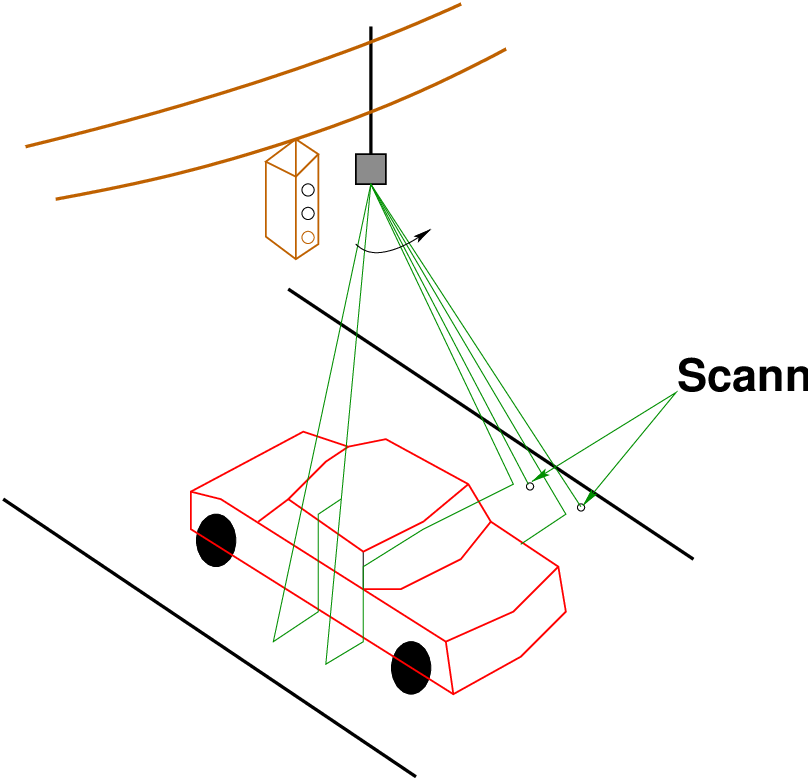
- Active Infrared (AIR)/Laser
Low power LED or laser diode fires a pulsed or continuous beam down to road surface
as shown in Fig. 4. Time for reflection to return is measured. Presence of a vehicle
lowers the time of reflection. High scanning rates provides a detailed profile
for classification determination. Use of Doppler frequency shift from moving
object allows for very accurate speed determination. The AIR system collected
following parameters flow volume, speed, classification, vehicle presence, traffic
density.
Advantages
- Very accurate flow, speed and classifications possible.
- Laser systems work in day and night conditions.
Disadvantages
- Active near-IR sensors adversely affected by weather conditions.
- Laser systems impeded by haze or smoke.
- Some problems with tracking small vehicles reported.
- Relatively high costs compared to other units. Precise, but limited zone of
detection require additional units over other systems.
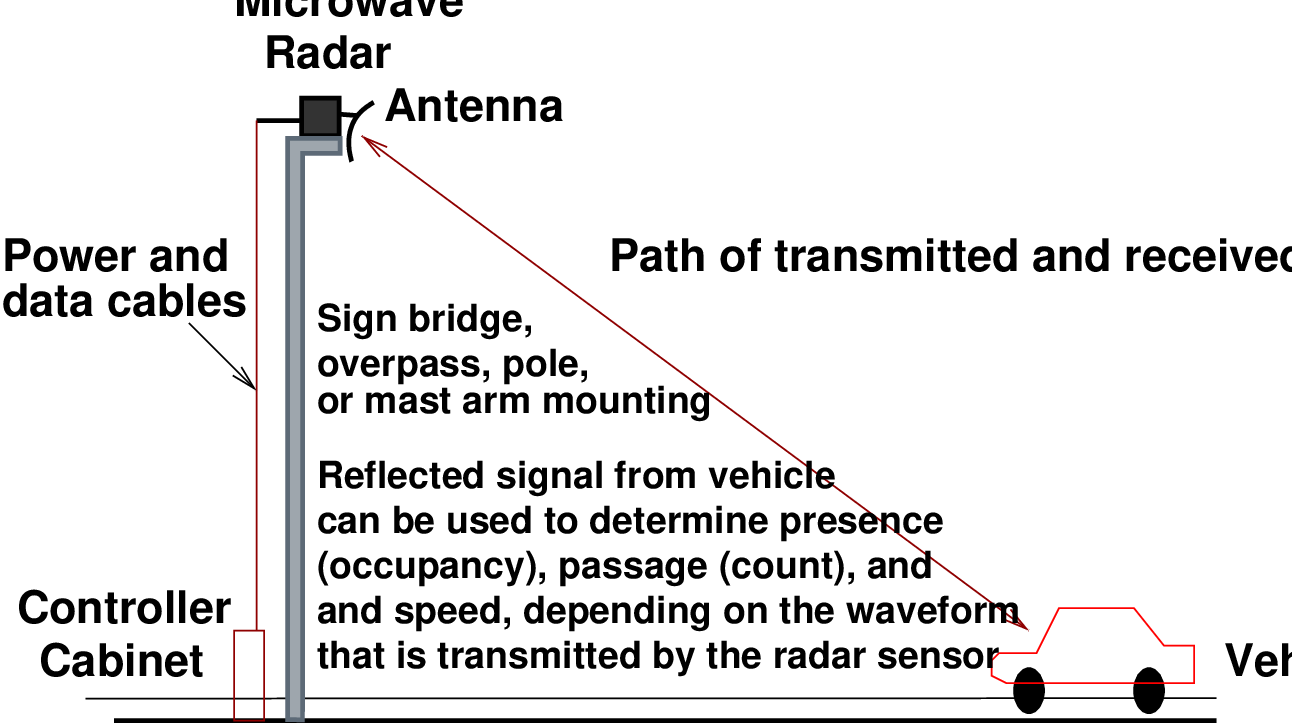
4 Microwave - Doppler and Radar
Low energy microwave radiation (2.5 to 24 GHz) is transmitted into the detection zone.
Objects within the zone reflect a portion of the radiation back to a receiver. Doppler
units use the frequency shift of the return to calculate speed as shown in Fig. 5.
It can’t detect the stationary objects. The microwave system collected following
parameters.
Doppler - Flow volume and speed;
Frequency-Modulated, Continuous Wave (FMCW) - Flow volume, speed and presence;
Microwave - Flow volume, speed, presence, possibly classification;
Advantages
- Very accurate. Easy to install, long ranged.
- Multiple detection zones possible.
- Day or night operation.
Disadvantages
- Possible sensitivity to spurious returns from adjacent objects
- Restrictions on use due to electromagnetic interference with other electronics.
5 Pulsed and Active Ultrasonic
Ultrasonic sensors transmit pressure waves of sound energy at a frequency between 25 and
50 KHz. Pulse waveforms measure distances to the road surface and vehicle surface by
detecting the portion of the transmitted energy that is reflected towards the sensor from an
area defined by the transmitter’s beam width. When a distance other than that to the
background road surface is measured, the sensor interprets that measurement as the
presence of a vehicle as shown in Fig. 6. The received ultrasonic energy is converted into
electrical energy that is analyzed by signal processing electronics that is either collocated
with the transducer or placed in a roadside controller. Vehicles flow and vehicular
speed can be calculated by recording the time at which the vehicle crosses each
beam.
Advantages
- Highly accurate.
Disadvantages
- Environmental effects affecting sound propagation degrade performance.
- Pulsed units with low sampling rate miscount or misclassify fast moving vehicles.
6 Passive Acoustic Array Sensors
An array of microphones is used to detect the sound of an approaching vehicle above an
ambient threshold level. Time lags and signal variations between microphone positions are
used to determine vehicle location relative to the array as shown in Fig. 7. Further processing
of signal yield to speed information and possibly engine type classification. It collected flow,
speed, occupancy, possibly classification.
Advantages
- Completely passive system
- Direct speed measurement.
Disadvantages
- Environmental effects affecting sound propagation degrade performance
- Low accuracy in busy locations due to interference from adjacent sources.
7 Summary
A non- Intrusive technology is very effective compared to the Intrusive technologies.
Exercises
- Write brief notes on the working principle, merits, and demerits of: (i) Video image
detection, (ii) Infrared sensors, (iii) Microwave - Doppler and Radar, (iv) Pulsed
and active ultrasonic, and (v) Passive acoustic array Sensors.
- Describe how probe vehicle is used to collect traffic data highligting the kind of
data and merits and de-merits of the technology.
References
- Texas Transportation Institute, Texas A and M University System. Travel Time
Data Collection Handbook,Report FHWA-PL-98-035, 1998.
- Traffic Detector Handbook. Third Edition Volume II, Publication
No.FHWA-HRT-06-139 October 2006., 2006.
- Final Report of Evaluation of Freeway Travel Time Estimates. Castle Rock
Consultants Inc, Portland State University, 2019.
- B Coifman. Length based vehicle classification on freeways from single loop
Detectors. al University Transportation Center Final Report, 2009.
- G C de Silva. Automation of Traffic Flow Measurement Using Video Images.
Thesis Report, University of Moratuwa, 2001.
- S Ding. Freeway Travel Time Estimation using Limited Loop Data. Master Thesis,
The University of Akron, 2008.
- M L Y Elena and L A Klein. Summary of vehicle detection and surveillance
technologies used in intelligent transportation systems. FHWA Report, New
Mexico State University and VDC Project Consultant, 2000.
- A Faghri and K Hamad. Applications of GPS in Traffic Management. 2002.
- L Guillaume. Road Traffic Data: Collection Methods and Applications. JRC
Technical note 47967, 2008.
- U Leeds. Collection Methods for Additional Data, IMAGINE project no. 503549.
Institute for Transport Studies, University of Leeds, United Kingdom, 2006.
- P T Martin, Y Feng, and X Wang. Detector Technology Evaluation. Department
of Civil and Environmental Engineering, Utah Traffic Lab, 2003.
- S T Mohammad. Vehicle re-identification Based on Inductance Signature
Matching. Master thesis, University of Toronto, 2011.
- N Nihan, X Zhang, and Y Wang. Improved System for Collecting Real-Time
Truck Data from Dual Loop Detectors. Transportation Northwest, 2005.
- S G Ritchie S Park and O Cheol. Field Investigation of Advanced Vehicle
Re-identification Techniques and Detector. California PATH Research Report,
2002.
- A Parsekar. Blind Deconvolution of Vehicle Inductive Signatures for Travel
Time Estimation. Master thesis, Department of Computer Science, University of
Minnesota Duluth, Duluth, Minnesota -55812, 2004.
- C Ulberg. Vehicle occupancy forecasting, Technical Report. Washington
State Department of Transportation Technical, Graduate School of Public Affairs
University of Washington Seattle, Washington 98105, 1994.
- J Xia and M Chen. Freeway Travel Time Forecasting Under Incident. Final
Report, Southeastern Transportation Center, Department of Civil Engineering,
University of Kentucky, Lexington, KY 40506, 2007.
- B Young and M Saito. Automated Delay Estimation at Signalized Intersections.
Research Division, 2011.
- Y Zhirui. Speed estimation using single loop detector outputs. Some studies,
Ph.D thesis, Department of CIVIL Engineering, Texas A and M University, 2007.
Acknowledgments
I wish to thank several of my students and staff of NPTEL for their contribution in this lecture.
Specially, I wish to thank my student K. B. Raghuram for his assistance in developing the
lecture note, and my staff Ms. Reeba in typesetting the materials. I also appreciate your
constructive feedback which may be sent to tvm@civil.iitb.ac.in
Prof. Tom V. Mathew
Department of Civil Engineering
Indian Institute of Technology Bombay, India
_________________________________________________________________________
Thursday 31 August 2023 12:12:34 AM IST