Travel Time Data Collection
Lecture Notes in Transportation Systems Engineering
Contents
______________________________________________________________________
1 Introduction
Travel time can be defined as the period of time to transverse a route between any two points
of interest. It is a fundamental measure in transportation. Travel time is also one of the most
readily understood and communicated measure indices used by a wide variety of users,
including transportation engineers, planners, and consumers. Travel time data is useful for a
wide range of transportation analyses including congestion management, transportation
planning, and traveler information. Congestion management systems commonly use
travel time-based performance measures to evaluate and monitor traffic congestion.
In addition, some metropolitan areas provide real-time travel time prediction as
part of their advanced traveler information systems (ATIS). Travel time data can
be obtained through a number of methods. Some of the methods involve direct
measures of travel times along with test vehicles, license plate matching technique, and
ITS probe vehicles. Additionally, various sensors (e.g. inductance loop detectors,
acoustic sensors) in ITS deployment collect a large amount of traffic data every day,
especially in metropolitan areas. Such data can be used for travel time estimation for
extensive applications when direct measurements of travel times are not available
[19].
Travel time, or the time required to traverse a route between any two points of interest, is a
fundamental measure in transportation. Travel time is a simple concept understood and
communicated by a wide variety of applications for transportation engineers and planners.
Several data collection techniques can be used to collect travel times. These techniques are
designed to collect travel times and average speeds on designated roadway segments or
links.
Following are the different techniques available for the travel time data collection.
- Test Vehicle Techniques
- License Plate Matching Techniques
- ITS Probe Vehicle Techniques
- Emerging and Non-Traditional Techniques
2 Test Vehicle Techniques
Travel time data using active test vehicles in combination with varying levels of instrumentation:
manual (clipboard and stopwatch), an electronic distance measuring instrument (DMI), or a
global positioning system (GPS) receiver. It involves the use of data collection vehicle
within which an observer records cumulative travel time at predefined checkpoints
along a travel route. Then this information converted to travel time, speed, and delay
for each segment along the survey route. There are several different methods for
performing this type of data collection, depending upon the instrumentation used in
the vehicle. These vehicles are instrumented and then sent into the field for travel
time data collection, they are sometimes referred to as “active” test vehicles [16].
Advantages
- Advanced test vehicle techniques (e.g., DMI or GPS use) result in detailed data.
- Low initial cost.
Disadvantages
- Sources of possible error from either human or electric sources that require
adequate quality control,
- Data storage difficulties.
3 License Plate Matching Techniques
Travel times by matching vehicle license plates between consecutive checkpoints with varying
levels of instrumentation: tape recorders, video cameras, portable computers, or automatic
license plate character recognition [16].
Advantages
- Travel times from a large sample of motorists, very simple technique.
- Provides a continuum of travel times during the data collection period.
Disadvantages
- Travel time data limited to locations where observers or video cameras can be
positioned;
- Limited geographic coverage on a single day
- Accuracy of license plate reading is an issue for manual and portable computer
4 ITS Probe Vehicle Techniques
Travel times using ITS components and passive probe vehicles in the traffic stream
equipped with signpost-based transponders, automatic vehicle identification (AVI)
transponders, ground-based radio navigation, cellular phones, or GPS receivers [16].
Some vehicles are equipped with dynamic route guidance (DRG) device which act as roving
traffic detectors, a non-infrastructure based traffic monitoring system. Such vehicles, which
are participating in the traffic flow and capable of determining experienced traffic conditions
and transmitting these to a traffic center, are called probe vehicles. To determine its
position and to register experienced traffic conditions, a probe vehicle is equipped with
on-board electronics, such as a location and a communication device. By means of the
location device, the probe vehicle keeps track of its own geographic position [16].
Through the communication device, the probe vehicle transmits its traffic experiences via a
mobile communication link to a traffic center. For instance, each probe can transmit traffic
messages once every time interval containing its location and its speed at the instant of
transmission. In this traffic center the traffic data received from probe vehicles is gathered,
and combined with data from the other monitoring sources, and processed into relevant
traffic information. It is very useful for Advanced Traveler Information system (ATIS).
Advantages
- Low cost per unit of data
- Continuous data collection
- Automated data collection
- Data are in electronic format
- No disruption of traffic
Disadvantages
- High implementation cost
- Fixed infrastructure constraints - Coverage area, including locations of antenna
- Requires skilled software
- Not recommended for small scale data collection efforts
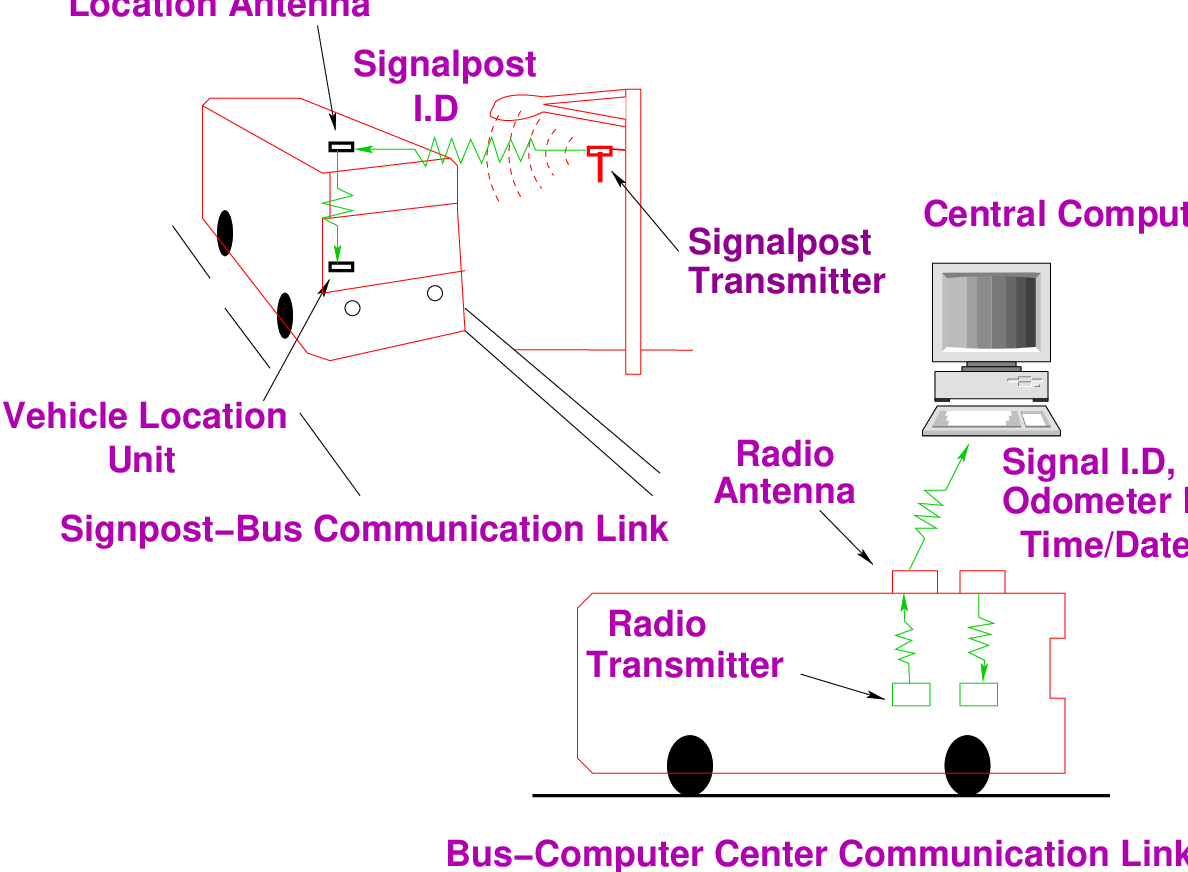
ITS probe vehicle data collection systems
- Signpost-Based Automatic Vehicle Location (AVL) - This technique has
mostly been used by transit agencies. Probe vehicles communicate with
transmitters mounted on existing signpost structures shown in Fig. 1 [16].
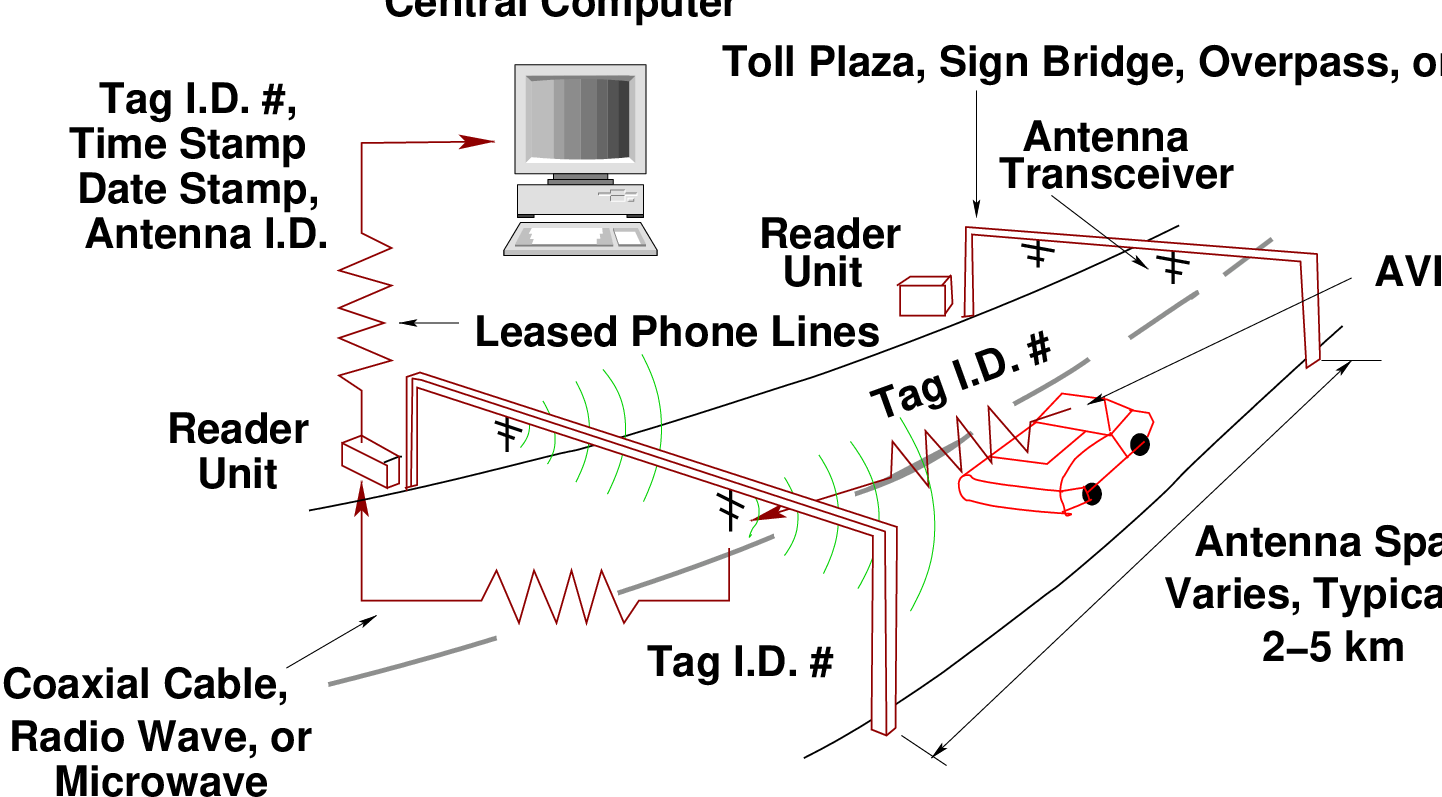
- Automatic Vehicle Identification (AVI) - Probe vehicles are
equipped with electronic tags. These tags communicate with
roadside transceivers to identify unique vehicles shown in
Fig. 2 and collect travel times between transceivers [16].
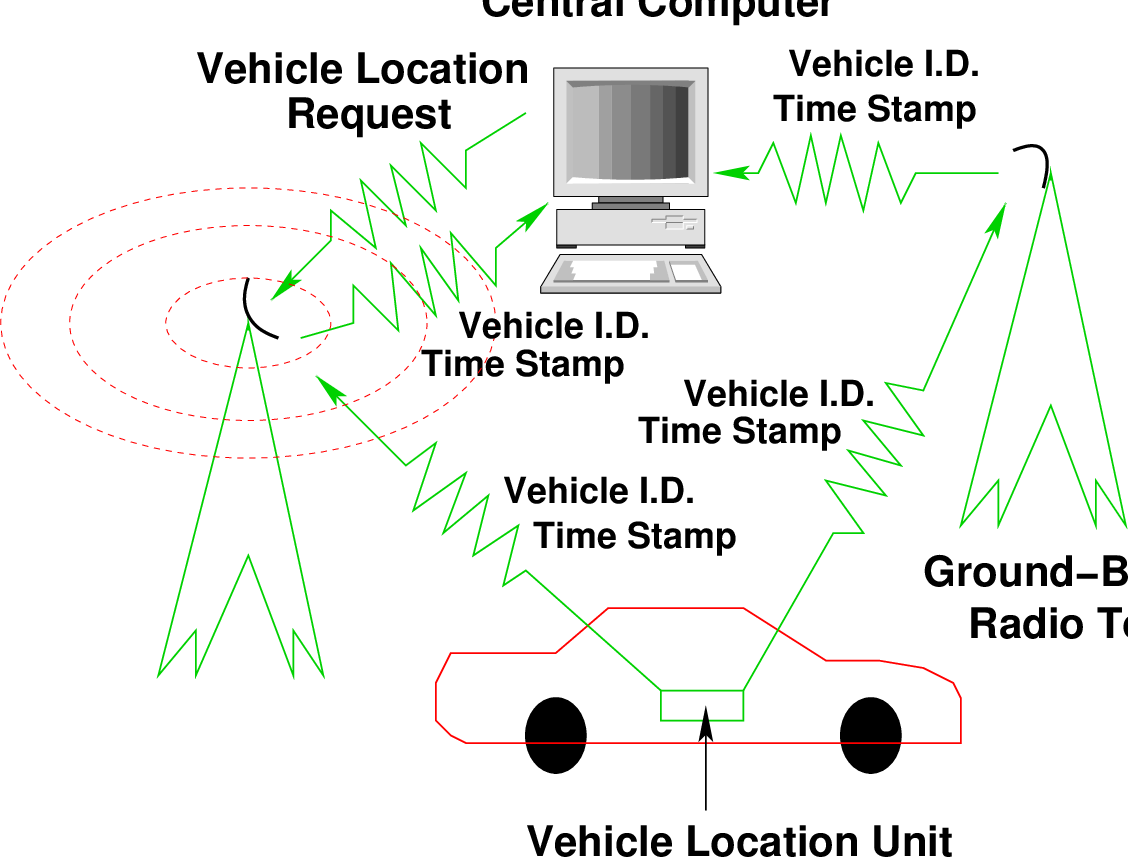
- Ground-Based Radio Navigation - It is used for transit or commercial
fleet management, this system is similar to the global positioning
system (GPS). Data are collected by communication between probe
vehicles and a radio tower infrastructure as shown in Fig. 3 [16].
5 Cellular Geo-location
This experimental technology can collect travel time data by discretely tracking cellular
telephone call transmissions. Cellular telephones are also useful to collect travel time data.
Two techniques have been applied using cellular technology: cellular telephone reporting and
cellular geolocating [16].
5.1 Cellular Telephone Reporting
An operator at the central control facility records each driver’s identification, location, and
time, by monitoring the time between successive telephone calls, travel time or travel speed
between reporting locations are determined. It is useful for assessment of current traffic
conditions and for collecting travel time data during delays or accidents. The cellular
telephone reporting method is recommended for short-term studies with low accuracy
requirements.
5.2 Cellular Geolocation
The cellular geolocating methodology discreetly tracks cellular telephone calls to collect travel
time data and monitor freeway conditions. This technique utilizes an existing cellular
telephone network, vehicle locating devices, and a central control facility to collect travel time
data. All vehicles equipped with cellular telephones are potential probe vehicles. The system
automatically detects cellular telephone call initiations and locates the respective probe
vehicle within a few seconds.
Advantages
- Driver recruitment not necessary
- No in-vehicle equipment to install
- Large potential sample
Disadvantages
- Low accuracy
- Privacy issues
- Infrastructure dependent
6 Emerging and Non-Traditional Techniques
Emerging or non-traditional techniques are based on using “point” vehicle detection
equipment, such as inductance loop detectors or video cameras. Travel time estimation
algorithms have been developed based upon measurable point parameters such as volume,
lane occupancy, or vehicle headways. Image matching algorithms are used to match vehicle
images or signatures captured at two consecutive observation points. Following are some of
the methods used in emerging techniques [16].
6.1 Extrapolation Method
Estimates average travel time by spot speeds, applied for short roadway segments between
detection devices. It is more suitable for low accuracy application. The most accurate method
to measure vehicle speed with loop detectors is to place two detectors in series, which is
referred to as “speed trap” or “loop trap”. The accuracy of inductance loop speed traps is
dependent upon the trap length, inductance loop wire type, and consistency in design. Many
inductance loop detectors are single loops; primary application is to collect vehicle counts and
lane occupancy. Many research attempts have been made to utilize speed-flow
relationships to estimate vehicle speeds from single loop detectors. The following 1 and 2
equations have been used to estimate spot speeds from single loop detectors [16].
 | (1) |
where,
g = speed correction factor (based upon assumed vehicle length, detector configuration, and
traffic conditions).
 | (2) |
6.2 Vehicle Signature Matching
Calculates travel time by matching unique vehicle signatures between sequential observation
points. These methods can utilize a number of point detectors such as inductance loop
detectors, weigh-in motion sensors, video cameras, and laser scanning detectors. Vehicle
signatures between two consecutive locations to provide a link based travel time and speed. It
provides alternative to ITS probe vehicle based on travel time measurement, in which a probe
vehicle is identified and matched between two locations using a unique identification number.
Vehicle signature matching had been investigated using a number of different point detection
devices, mostly with inductance loop detectors. Several algorithms are available to
capture vehicle signatures from a loop detector frequency detuning curve. Different
types and classes of vehicles provide different types of signatures. The unique
features of a vehicle signature are then compared to signatures within a given time
frame at a downstream location. The signature is matched when a large number of
feature correlations have been found within vehicle signatures at the downstream
location. The vehicle signature matching technique does not match every vehicle
signature captured, but potentially match a large enough percentage as to be significant
[16].
7 Summary
Detailed travel time estimation by different techniques has been discussed in this chapter.
Also travel time estimation by vehicle technology and emerging techniques such as vehicle
signature have also been discussed in this chapter.
Exercises
- In the absense of any automated equipments, how would you conduct a survey
to get travel time data in a stretch of road.
References
- Texas Transportation Institute, Texas A and M University System. Travel Time
Data Collection Handbook,Report FHWA-PL-98-035, 1998.
- Traffic Detector Handbook. Third Edition Volume II, Publication
No.FHWA-HRT-06-139 October 2006., 2006.
- Final Report of Evaluation of Freeway Travel Time Estimates. Castle Rock
Consultants Inc, Portland State University, 2019.
- B Coifman. Length based vehicle classification on freeways from single loop
Detectors. al University Transportation Center Final Report, 2009.
- G C de Silva. Automation of Traffic Flow Measurement Using Video Images.
Thesis Report, University of Moratuwa, 2001.
- S Ding. Freeway Travel Time Estimation using Limited Loop Data. Master Thesis,
The University of Akron, 2008.
- M L Y Elena and L A Klein. Summary of vehicle detection and surveillance
technologies used in intelligent transportation systems. FHWA Report, New
Mexico State University and VDC Project Consultant, 2000.
- A Faghri and K Hamad. Applications of GPS in Traffic Management. 2002.
- L Guillaume. Road Traffic Data: Collection Methods and Applications. JRC
Technical note 47967, 2008.
- U Leeds. Collection Methods for Additional Data, IMAGINE project no. 503549.
Institute for Transport Studies, University of Leeds, United Kingdom, 2006.
- P T Martin, Y Feng, and X Wang. Detector Technology Evaluation. Department
of Civil and Environmental Engineering, Utah Traffic Lab, 2003.
- S T Mohammad. Vehicle re-identification Based on Inductance Signature
Matching. Master thesis, University of Toronto, 2011.
- N Nihan, X Zhang, and Y Wang. Improved System for Collecting Real-Time
Truck Data from Dual Loop Detectors. Transportation Northwest, 2005.
- S G Ritchie S Park and O Cheol. Field Investigation of Advanced Vehicle
Re-identification Techniques and Detector. California PATH Research Report,
2002.
- A Parsekar. Blind Deconvolution of Vehicle Inductive Signatures for Travel
Time Estimation. Master thesis, Department of Computer Science, University of
Minnesota Duluth, Duluth, Minnesota -55812, 2004.
- C Ulberg. Vehicle occupancy forecasting, Technical Report. Washington
State Department of Transportation Technical, Graduate School of Public Affairs
University of Washington Seattle, Washington 98105, 1994.
- J Xia and M Chen. Freeway Travel Time Forecasting Under Incident. Final
Report, Southeastern Transportation Center, Department of Civil Engineering,
University of Kentucky, Lexington, KY 40506, 2007.
- B Young and M Saito. Automated Delay Estimation at Signalized Intersections.
Research Division, 2011.
- Y Zhirui. Speed estimation using single loop detector outputs. Some studies,
Ph.D thesis, Department of CIVIL Engineering, Texas A and M University, 2007.
Acknowledgments
I wish to thank several of my students and staff of NPTEL for their contribution in this lecture.
Specially, I wish to thank my student K. B. Raghuram for his assistance in developing the
lecture note, and my staff Ms. Reeba in typesetting the materials. I also appreciate your
constructive feedback which may be sent to tvm@civil.iitb.ac.in
Prof. Tom V. Mathew
Department of Civil Engineering
Indian Institute of Technology Bombay, India
_________________________________________________________________________
Thursday 31 August 2023 12:12:40 AM IST